
卓信创驰推出了支持Intel 第6、7、8、9代CPU + FPGA扩展的视觉和运动控制解决方案V510系列,这个方案具有性能强大、开放框架、可靠易用的优势和特点。

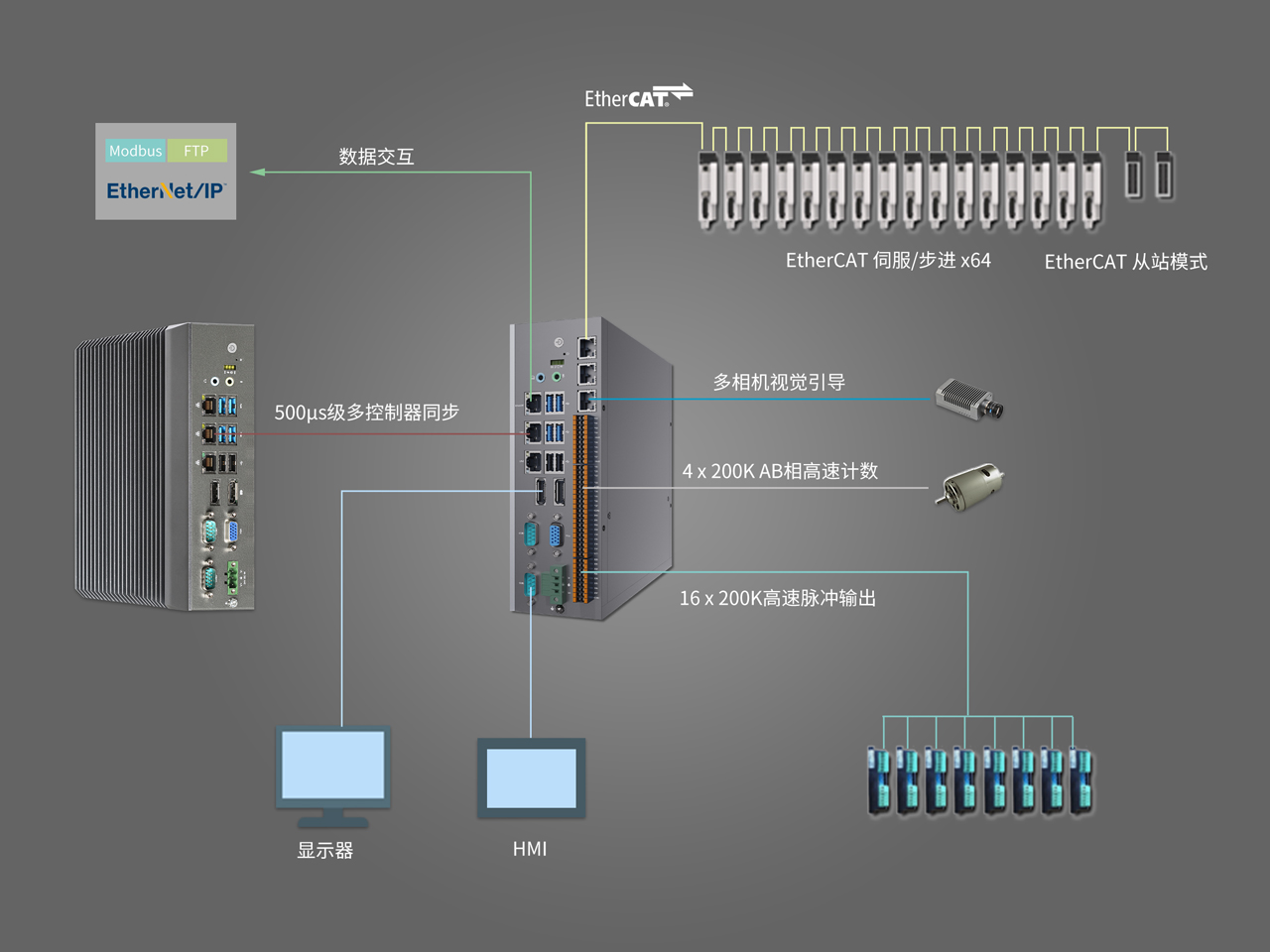
V510系列方案支持EtherCAT主站,支持最多 64轴运动控制和128个EtherCAT从站 , EtherCAT控制周期可缩短至500μs ,支持常⻅的主流EtherCAT驱动和IO;在运动控制方面,V510系列支持2轴平面插补、3轴空间插补、电子 凸轮等高级运动控制功能,可以进行T型与S型速度曲线规划,最多支持4个坐标系连续插补;V510系列方案具备丰富的IO接口,内置64高速IO,包括最多16路200KHz 高速脉冲输出和4路200KHz AB相高速计数,和6个intel i21X系列千兆以太网口;V510系列在机器视觉方面支持常用的机器图像算法用于视觉引导 和测量应用 ,内置了常用机械结构的对位算法,并支持用户自定义点对位算法;支持PLC编程语言:LD、C和ST , 支持C#、C++等高级语言程序开发 , 机器程序独立运行于实时系统,即使 Microsoft Windows出现异常也能稳定运行。
V510系列方案采用灵活的API函数调用,并结合C#、C++等高级语言开发环境和PLC开发环境以及实时系统的特点,改进了操作逻辑和界面,可以方便地建立快速、直接的数据链接。
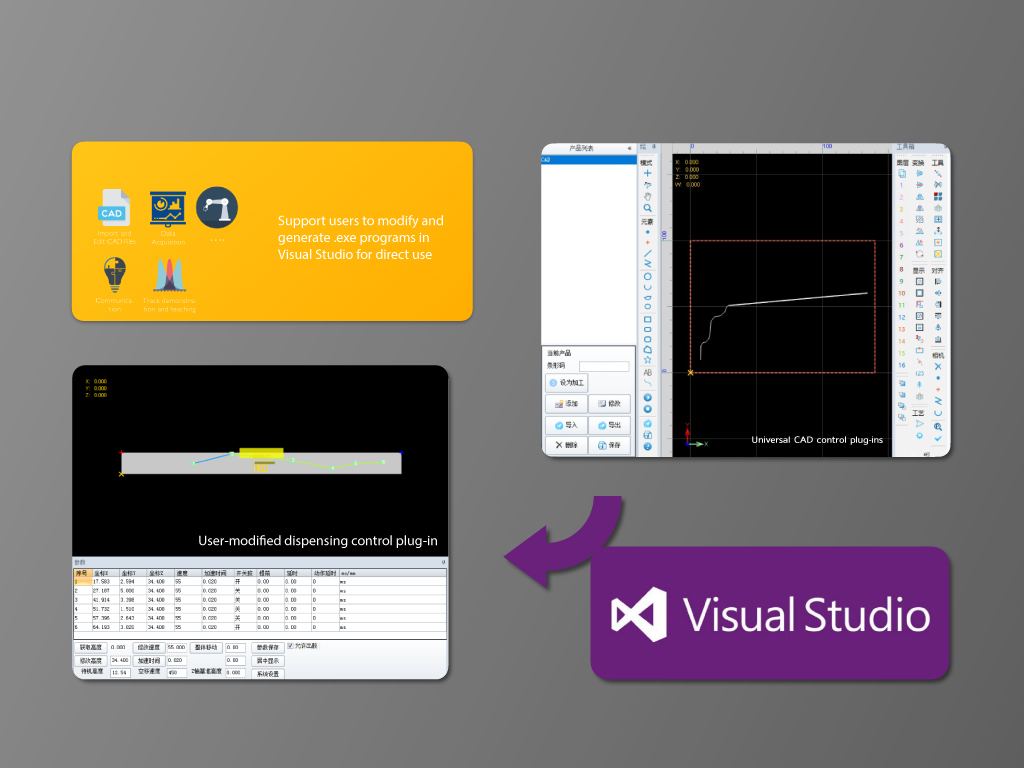
如下图中的点胶行业应用案例,用户可以通过调用的内置控件库中的CAD控件,导入或绘制运动轨迹,并直接转化为轴的运动数据。用户还可以通过开放的接口对内置的控件进行改造,让标准的CAD控件变成了适合点胶行业应用的行业控件,增加点胶相关的示教信息列表、路径和金手指位置的颜色强化等信息,使用起来更加便捷。
在工业现场的应用场景里,很多工程师和项目经理更倾向使用梯形图或ST,开发设备的逻辑和运动控制功能。对于机器个性化的示教和显示界面,以及与上位系统的通讯功能,通过高级语言开发的各种控件则更加灵活和易于调试,采用传统方式需要在两套系统的通讯上花费一定的开发和调试时间。
在V510系列方案的内置的框架中,可以将PLC中使用的“变量”列表导出为文件,用户可以在Visual Studio中对此文件进行修改保存后,在程序中直接读取或写入。
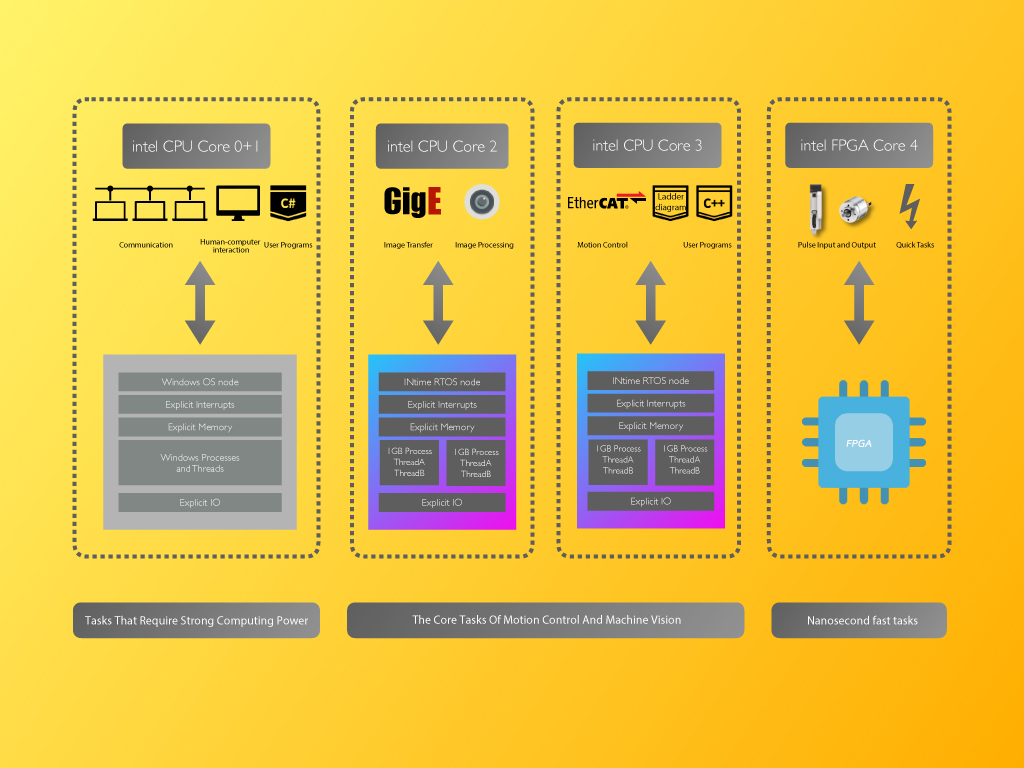
在卓信创驰的这套视觉和运动控制解决方案中,用户的PLC以及C语言程序运行在实时系统中(RTOS)中,这不仅是用户程序,还包括用户程序中调用的EtherCAT协议栈,运动控制算法等需要稳定运行、快速响应的功能模块,都需要运行在实时系统(RTOS)中,以保证系统的稳定和性能。
V510系列方案引入了开放的实时环境,用户可以直接使用高级语言开发用户程序。不同于虚拟机技术(hypervisors)、Windows设备驱动程序或是单片机应用程序,实时系统是一个完整的操作系统,独占Intel CPU运算核心、内存、I/O和中断。实时系统完全独立于Microsoft Windows,是响应重要任务最快速和最安全的选择。
除了能够缩短系统的执行周期(Cycle time)以及提高系统的稳定性外,基于实时系统的用户程序可以实现传统运动控制卡方案难以实现的功能,比如:
A、转盘或流水线设备中经常使用的传感器到位信号,传统方案的脉冲信号捕捉容易受到Windows执行周期抖动的影响。实时系统可以实现类似PLC才能实现的稳定的脉冲捕捉功能。
B、机器视觉领域的用户,可以将自己的视觉算法在实时系统中重新编译,通过调用V510系列方案的的实时GigE协议,实现机器视觉功能与设备其他功能模块(如运动控制)的高效、稳定的交互。
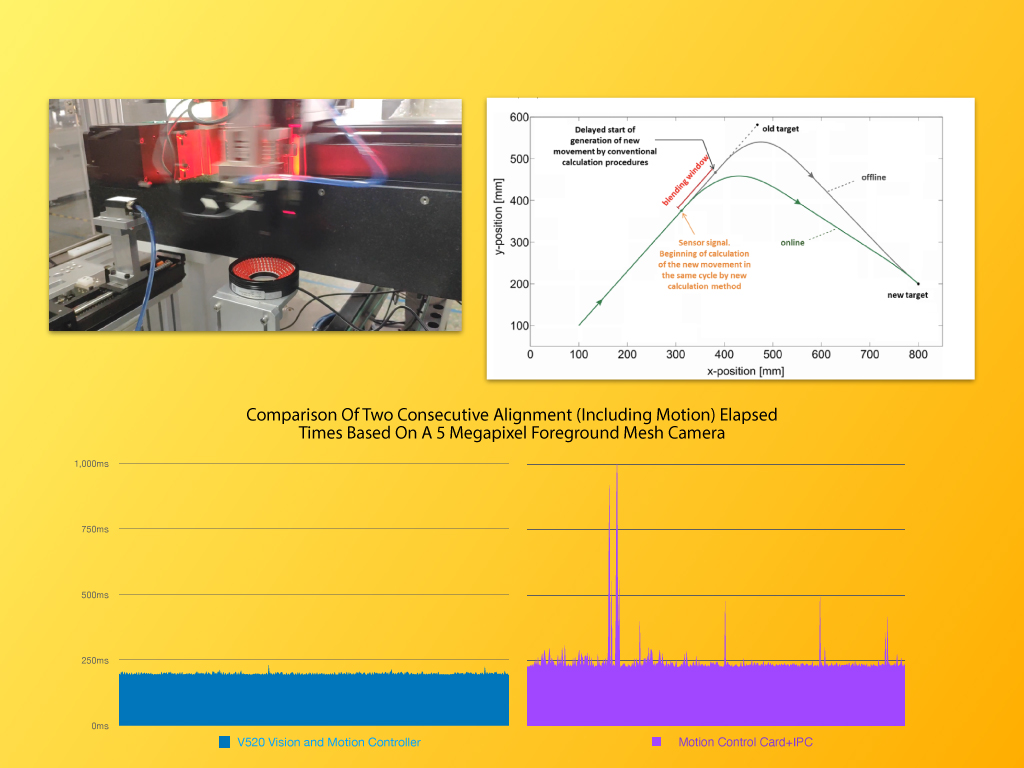
下图是SMT设备执行周期的对比,运行在实时系统中的机器视觉与运动控制,可以获得更好的机器运行效果。
C、针对运动控制领域的客户,可以将自己的机器人跟随算法运行在实时系统中,通过调用V510系列方案中的N轴插补,实现更稳定和精确的运动控制。
D、 用户可以将网口、串口由实时系统管理,适用于要求高速及稳定通讯的应用场合。
V510系列方案结合欧洲运动算法,针对3D空间进行路径优化 ,采用可视化界面路径文件导入和示教 ,让用户可以轻松便捷的自定义的点胶控件,将在会在点胶行业大有可为;基于实时系统的⻜行拍摄技术 , S型速度曲线规划,和 64轴EtherCAT和脉冲运动控制 功能的V510系列方案应用于工业组装的现场环境,可以大幅度提升生产效率和品质,受到很多工业客户的欢迎。运动控制过程中的精确位置比较输出, 运动控制与视觉、模拟 量的实时交互 和异常掉电数据保持等特点V510系列可以广泛的应用于各种需要精密测量的工业现场。




Copyrigt © 深圳市卓信创驰技术有限公司 All Rights Reserved 粤ICP备18096933号-1





